







Please Leave Us A Message
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.
86--18820950101
Introduction
This article refers to the address: http://
This article will focus on the design techniques and related challenges of implementing electric bicycles using microcontrollers or programmable system-on-chip (PSoC). The current industry's electric bicycle system uses a microcontroller and external signal conditioning and comparator circuits to drive three-phase motors; an external ADC and an external amplifier to support different sensor inputs; and a relay drive circuit to support brake lights, headlights, and turn signals; It also supports LED/LCD displays and temperature measurements.
Programmable SOC devices can be used not only as a unified circuit board system for motor control, analog measurement, and direct drive LCD displays for electric bicycle applications, but also to support capacitive sensing technology to replace mechanical buttons on the keyboard. In addition, SOC devices can use internal PWM, MUX, and comparators to drive and control three-phase motors, internal ADC and PGA to support sensor input battery monitoring, and temperature sensing devices such as thermistors or RTDs for temperature sensing. The device not only directly drives the relay to support brake lights, headlights and turn signals, but also directly drives the LCD display to display temperature, battery status, speed, ride distance and various error/warning messages.
Using IDE-based tools, you can design a variety of interfaces and logic for SoCs. These tools also provide directly available component modules for designing more complex logic such as capacitive sensors for monitoring interfaces, ADCs that support analog sensors and other inputs, PWMs, DACs that drive buzzers, and segments, characters. Or a graphical LCD display, etc. Therefore, with the programmable SOC, the development and production cost of the electric bicycle system can be greatly reduced.
Figure 1 shows a block diagram of a basic electric bicycle system:
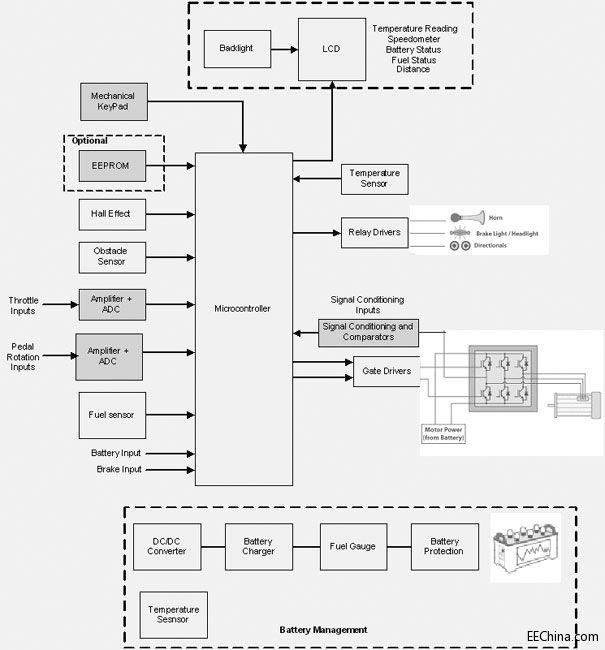
Figure 1: Block diagram of an electric bicycle
Microcontrollers: Microcontrollers are commonly used for different sensor input detection (eg throttle input, temperature sensor, battery input, fuel sensor, barrier sensor, etc.), analog to digital conversion, output comparison components, etc., and can be driven and controlled. No brush motor. Battery-powered electric bicycle systems require ultra-low power microcontrollers. In addition, the microcontroller is part of a central locking system that can be used to communicate with a variety of different external devices used in vehicles. Whenever braking, the microcontroller can be used to automatically stop the motor from rotating, thus avoiding the motor wearing brake pads faster than standard human bicycles.
Hub Motor: Normally, brushless motors can be used for efficient and reliable operation, with or without sensors (based on Hall effect).
Rechargeable lead-acid/lithium-ion batteries: Electric bicycle applications range from lead-acid batteries to lithium-ion batteries. Among them, rechargeable lead-acid batteries are widely used in electric vehicles.
Display and keyboard: In general, the LCD display with backlight can display temperature, battery input, speed, riding distance and error/warning messages, as well as the level of the pedal assist system and energy generation. . Electric car applications also use a keyboard based on mechanical buttons, and the keyboard can also support the anti-theft function of electric vehicles.
Power Management: This subsystem provides power to the operation of each functional module and monitors battery operation. A host microcontroller with comparators and discrete logic can be used to manage lead-acid batteries. In addition, this approach provides microcontrollers and users with safety and critical information about the battery.
principle
Current electric bicycle systems use 16-bit and 32-bit microcontrollers. The microcontroller controls and manages all the functions and features of the vehicle. Once the user turns on the ignition switch and starts the electric bicycle, the microcontroller can obtain input to start the three-phase brushless motor. The microcontroller can receive various vehicle input signals from the user and perform corresponding manipulations on the vehicle. The microcontroller drives the three-phase brushless motor at a speed selected by the user. The speed of the motor can be varied and controlled based on the user's acceleration and brake sensor inputs.
The microcontroller uses an internal or external serial EEPROM (I2C/SPI type) to store data such as distance readings. In addition, the microcontroller uses a real-time clock (RTC) to display accurate time on the display.
Temperature measurement is achieved by on-board RTD or thermistor type temperature sensing devices. The electric bicycle system can also use the obstacle sensor to obtain information about nearby vehicles while parking. The fuel sensor acquires fuel information from the engine, and the microcontroller can also monitor the battery input and display it on the LCD display. The relay drive circuit is used to switch the brake lights, headlights, and turn signals on/off.
The power supply section consists of a rechargeable lead-acid or lithium-ion battery as a power source and must meet the requirements of the battery charger. The battery input is downconverted to a DC voltage to power the microcontroller and other circuitry. The ignition switch enables or disables the on-board voltage regulator. In addition, the power supply section provides various protection functions such as battery, overcurrent, overheating, and startup fault status protection circuits. OEMs also make regulations for charging external devices such as mobile phones.
Figure 2 shows an electric bicycle system based on programmable SOC:
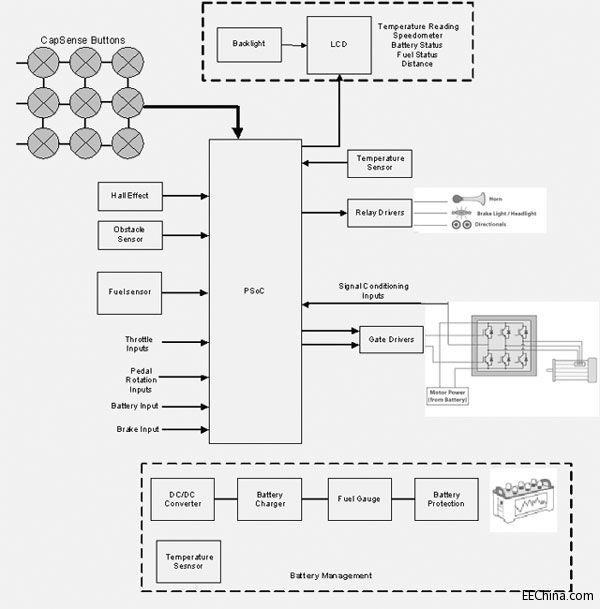
Figure 2: Block diagram of a PSoC-based electric bicycle solution
Implementation of electric bicycle system
In order to give a practical implementation of the electric bicycle system, this paper introduces a design based on Cypress PSoC 4. PSoC 4 devices are a perfect integration of microcontrollers with digital programmable logic, high performance analog-to-digital conversion, op amps with comparator modes, and standard communication and timing peripherals. The microcontroller is a 32-bit ARM Cortex M0 that operates at up to 48 MHz and offers up to 32 KB of flash and up to 4 KB of SRAM and 2 KB of internal EEPROM.
The implementation uses six P-channel MOSFETs and gate driver circuits on the board to drive a three-phase brushless motor. PSoC 4 devices have built-in PWM, clock, multiplexer and comparator for driving and controlling three-phase brushless motors. In addition, the built-in 16-bit PWM will be used to drive the FET gate driver circuit that controls the motor. The duty cycle of the PWM varies depending on the speed required by the user settings.
The PSoC4 features an internal op amp, PGA, comparator, and 12-bit 1MSPS SAR ADC that provides differential and single-ended modes, including sample-and-hold (S/H). The ADC can control motor speed by changing the PWM duty cycle and measure different sensor inputs to meet battery monitoring, low cost temperature sensing, obstacle sensing, and fuel sensing. This eliminates the need for any external amplifier, ADC or comparator.
Utilizing two current DACs (IDACs), the system features universal sensing and the ability to utilize capacitive sensing on any pin. The PSoC 4 architecture supports capacitive sensing components that support both manual and automatic tuning. The capacitive interface helps the entire electric bicycle system to achieve water resistance, while also directly driving the relay to fully meet the needs of speakers, brake lights, headlights, turn signals and LCD displays. The device operates from a voltage range of 1.71V to 5.5V and can be easily connected to other external peripherals for additional functionality. In addition, PSoC 4 supports two independent in-service reconfigurable serial communication modules (SCBs) with reconfigurable I2C, SPI or UART functions for internal and external peripheral communication.

May 12, 2023

December 31, 2022
E-mail naar dit bedrijf
May 12, 2023
December 31, 2022
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.
Fill in more information so that we can get in touch with you faster
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.